Projektvorstellung für den HS-KL Hackathon 2019
Stand: 3.1.2019
Autoren: Bernd Bufe, Alexander Schwarz
Tags: 3D Gesten, Laborautomatisierung, DoBot Roboterarm, Experiment
3D Gestensteuerung eines Roboterarms im Labor
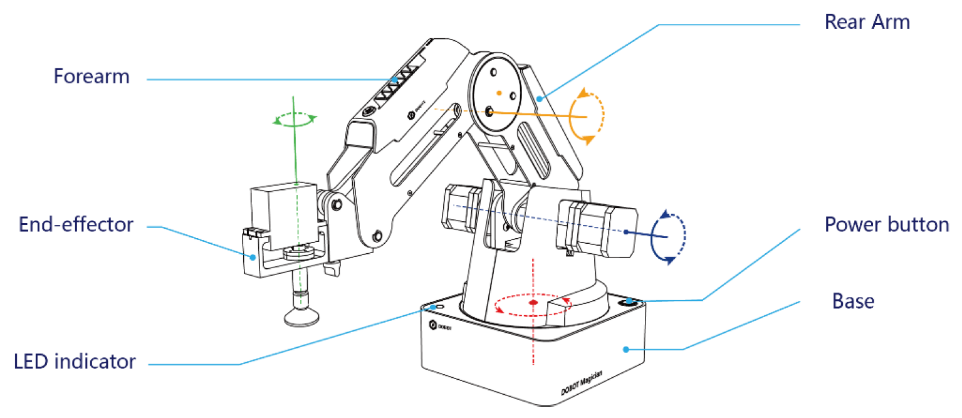
Unser Ziel ist es eine flexible Soft- und Hardwarelösung zu schaffen, die es qualifiziertem Laborpersonal, ganz ohne Programmier- und Informatikkenntnisse, ermöglicht, selbständig einen Gelenkarmroboter für ganz unterschiedliche Laboranwendungen zu programmieren. Das Projektergebnis – ein Software-Prototyp, der einen DoBot Roboterarm für die Verrichtung typischer Laborarbeitsschritte durch 3D-Gesten ansteuert – dient als Showcase für den Arbeitskreis Smart Machines, den Projektbeteiligten NEXT Industries Milano, und – nach Möglichkeit – als fachlicher Startpunkt für weiterführende Arbeiten, die z.B. im Rahmen von Praxisphasen, Bachelor- oder Masterarbeiten fortgeführt werden können.
Hier als PDF-Dokument öffnen.
Inhalt
Kurzbeschreibung
Erste Ziele sind die:
- Entnahme von Reaktionsgefäßen
- Interaktives Erlernen einer 3D Gesten Sprache
- Programmieren durch Gesten, durch Google Blockly oder durch eine Programmiersprache
- Evaluierung der Usability bei Laborarbeiten, wie:
- Transport von 96 Well Mikrotiterplatten.
- Aufstecken von Spitzen auf Pipetten
- Pipettieren von Flüssigkeiten
Das Teach-In des Roboters kann direkt am Roboterarm, oder aber durch einen in der Hand frei zu bewegenden 3D Gesten- und Lage-Erkenners erfolgen. Im Rahmen der fünftägigen Entwicklung im Hackathon soll eine erste Anwendungen für die kostengünstige Automatisierung typischer Routinearbeiten in Biologielaboren erstellt und validiert werden. Hierzu soll eine auch für Laien anwendbare Kombination von Programmiertechniken entwickelt werden, in denen der Roboter mit einer Kombination von Gestenerkennung, Sensortechnik sowie einer einfachen symbolorientierten Programmiersprache gesteuert wird.
Projektpate, ggfs. Industriepartner, Studentische Gruppe o.a.
Prof. Dr. Bernd Bufe, Alexander Schwarz (Assistent I/MST)
Fachliches Interesse, Vorwissen für dieses Projekt, Teamgröße
Diese Anwendungen sollen in interdisziplinären studentischen Teams konzipiert und entwickelt werden (Hinweis: Die genaue Ausprägung und Verteilung dieser unterschiedlichen Projektziele wird dynamisch je nach Zusammensetzung des Teams in der Projektwoche gesteuert). Die beteiligten Studierenden sollen Fähigkeiten und Arbeitsmodelle aus den jeweiligen Fachbereichen einbringen und sich diese auch gegenseitig vermitteln. Dazu gehören
o Die Konzeption und Evaluierung eines innovativen, gestenbasierten Kompromisses zwischen Programmierung und analogem, direktem „Teach-in“ Verfahren: Studierende können Gesten vorschlagen, evaluieren und anwenden.
o Die Möglichkeit einen Roboterarm gestengesteuert, interaktiv anzulernen bzw. durch eine einfach erlernbare, grafische Programmiersprache (Blockly) zu programmieren,
o Kenntnis über den Laboralltag, sowie typische Arbeitsabläufe und die dazugehörigen Bewegungen.

Ressourcen und Arbeitsmittel die für das Projekt erforderlich sind (bzw. gestellt werden)
Alle Unterlagen, und ein Tutorial zum Arbeiten mit dem Tactigon unter
- http://smart-machines.hs-kl.de/projekte/3dgesture-recognition/smart-machines_lab/
- http://smart-machines.hs-kl.de/ressourcen-des-ak/the-tactigon-tutorial/
Was geschieht nach dem Projekt mit den Ergebnissen?
Zum einen können aufgrund der Erkenntnisse weitergehende, vertiefte Bachelor und Masterarbeiten entstehen. Zum zweiten kann das Projekt sich in Richtung einer Unternehmensgründung entwickeln.
Vorbesprechung, Unterlagen zum Kennenlernen
Für Anfang Februar wird der verwendete DoBot, sowie der 3-D Gestenerkenner im O028 zum Experimentieren, und als 3-D Drucker zur Verfügung stehen. Für das Tactigon gibt es hier ein Tutorial.
Dokumentation und Tutorials zum DoBot finden sich u.a. hier:
- Beschreibungen und Videos wie der Roboter an Schulen, Universitäten und in Firmen zur Weiterbildung eingesetzt wird https://www.dobot.cc/customer-story/university-robot-education-program
- Viele Videos für Beispielanwendungen unter https://www.dobot.cc/videos-center.html
- Forum unter https://forum.dobot.cc/
- Grundlegende Tutorials unter https://www.dobot.cc/tutorials-center.html
- Im Downloadbereich der DOBOT-Website sind hilfreiche Dokumentationen und Demos zu finden https://www.dobot.cc/downloadcenter.html?sub_cat=73#sub-download