Autoren: Prof. Adrian Müller, Prof. Bernd Bufe
Smart-Machines::Lab
Laborarbeiten intelligent automatisiert
Inhalt
Was ist ein Smartes Labor?
Das Entwicklungsziel ist eine leicht-gewichtige, kostengünstige Teilautomatisierung typischer molekularbiologischer Laborverfahren mittels intelligenter Steuerung von Gelenkarmrobotern.
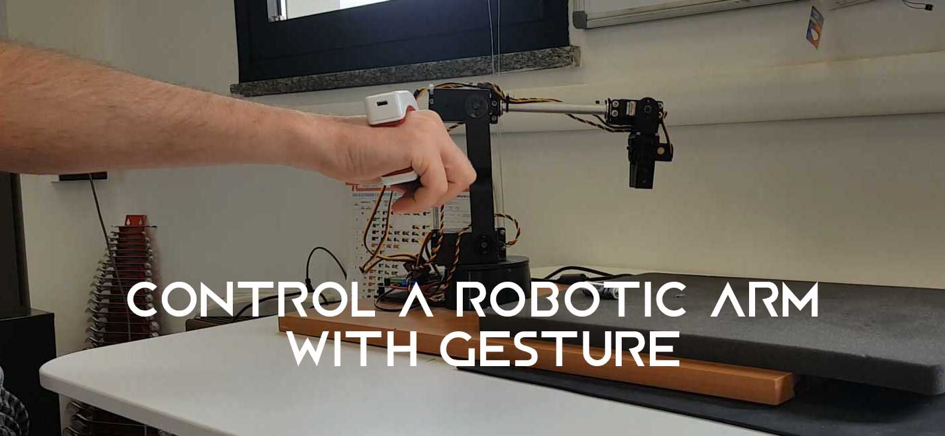
Abbildung 1: 3D Gestenerkennung und T-Skin (Prototyp). Quelle: thetactigon.com, 2018
Wir wollen die Möglichkeiten der neuen Industrie 4.0 Techniken unter Einbindung kreativer Hard- und Softwarelösung nutzen, um kostengünstige, flexible Robotersysteme für den Einsatz in modernen Hochdurchsatz-Forschungslaboratorien zu entwickeln.
Unmittelbare Aufgaben sind:
- „Klassisches Pick & Place“, Beschickung eines Hochdurchsatzmikroskops mit Proben
- „Intelligente Zellkultur“, Erkennung & Entnahme von Proben aus einem Inkubator
- „Smart Liquid Handling“, Pipettieraufgaben zur präzisen Dosierung von Flüssigkeiten
Am Ende soll eine einfache Nutzung dieser Systeme für möglichst viele Labore mit variablen Arbeitsprozessen möglich sein. Da die Entwicklung von Prozessabläufen später auch durch Laien erfolgen soll, ist die Implementierung eine Gestenerkennung ein integraler Projektstandteil. Dazu steht dem Projekt ein innovativer 3D-Gestenerkenner (s. thetactigon.com) zur Verfügung. Im Laufe des Vorhabens wird es wahrscheinlich nötig sein, weitere Teilgeräte zu kaufen und eventuell auch einen zweiten Gelenkarmroboter anzuschaffen. Hierfür steht dem Team einen Etat von ca. 5000. EUR zur Verfügung.
Wir bieten ein spannendes Thema in einem stark interdisziplinären ausgerichteten Arbeitsumfeld, sowie ein starkes Betreuerteam. Hilfestellung zur Programmierung übernimmt Prof. Adrian Müller, Hilfestellung zu Laborabläufen und Prozesstechnik übernimmt Prof. Bernd Bufe.
Interessenten stehen ein erster Gelenkarmroboter sowie ein komplett eingerichtetes molekularbiologisches Labor für die Entwicklung und die Tests zur Verfügung. Die Arbeiten umfassen den Einsatz von Methoden der Künstlichen Intelligenz, der Mensch-Maschine-Kommunikation und der Mustererkennung.
3D Gestenerkennung für Smarte Maschinen
Dieses Projekt ist Teil eines größeren Programms zur intelligenten Steuerung von Maschinen. Die Beschreibung und der Zeitplan des Programms finden Sie hier.
Projektarbeit WS 18/19
Vorgehen
- Das Team wird initial mit einem 4DOF Roboterarm (mit Werkzeugen wie 2-Finger Greifer, Sauger) ausgestattet; dazu Kursmaterial zum Kennenlernen der Programmierung
- Das Teach-In des Roboters kann direkt am Roboterarm, oder aber durch einen in der Hand frei zu bewegenden 3D Gesten- und Lage-Erkenner erfolgen (http://thetacigon.com).
- Hier einige Beispiele, welcher Arm bzw. welche Arme zum Einsatz kommen können, und das 3D Board.



Abbildung 2: Roboterarme DOBOT und 7Bot, 3D Gesten-Erkennung (Board mit Bluetooth Modul)
- fachliche Ansprechpartner für Labortechnik stehen zur Verfügung, diese arbeiten bei Bedarf im Team mit.
Randbedingungen
- möglichst offener Ansatz für die Steuerungssoftware; keine Abhängigkeit von proprietärer Software
- automatischer Werkzeugwechsel am Roboterarm; alternativ: Kooperation zweier Roboterarme (mit unterschiedlichen Werkzeugen)
- Bildererkennung und –Auswertung sind für spätere Phasen des Projekts vorbehalten.
- geringe physikalische Belastung der Hardware (zu bewegende Objekte wiegen weniger als ca. 500 Gramm). Später können evtl. auch schwerere Objekte im Projekt angegangen werden.
- Reichweite der Arme mindestens 400 mm; alternativ: Transportsystem (Förderband, Schienensystem, anderes). Der Finger-Greifer muss mindestens 8cm weit öffnen.
- Agile Entwicklung (Scrum) mit inkrementellen Prototyping. Der finale Prototyp und die entwickelten Systeme sind als Startpunkt für eine spätere Überführung in Produkte Ausgründung eines spezialisierten Dienstleisters gedacht.
Projektfortschritt
Arbeitsergebnisse sowie Projektfortschritte, darunter auch Beispiel-Videos und Hintergrundmaterial zu den Laborarbeiten, werden in regelmäßigen Abständen hier veröffentlicht.