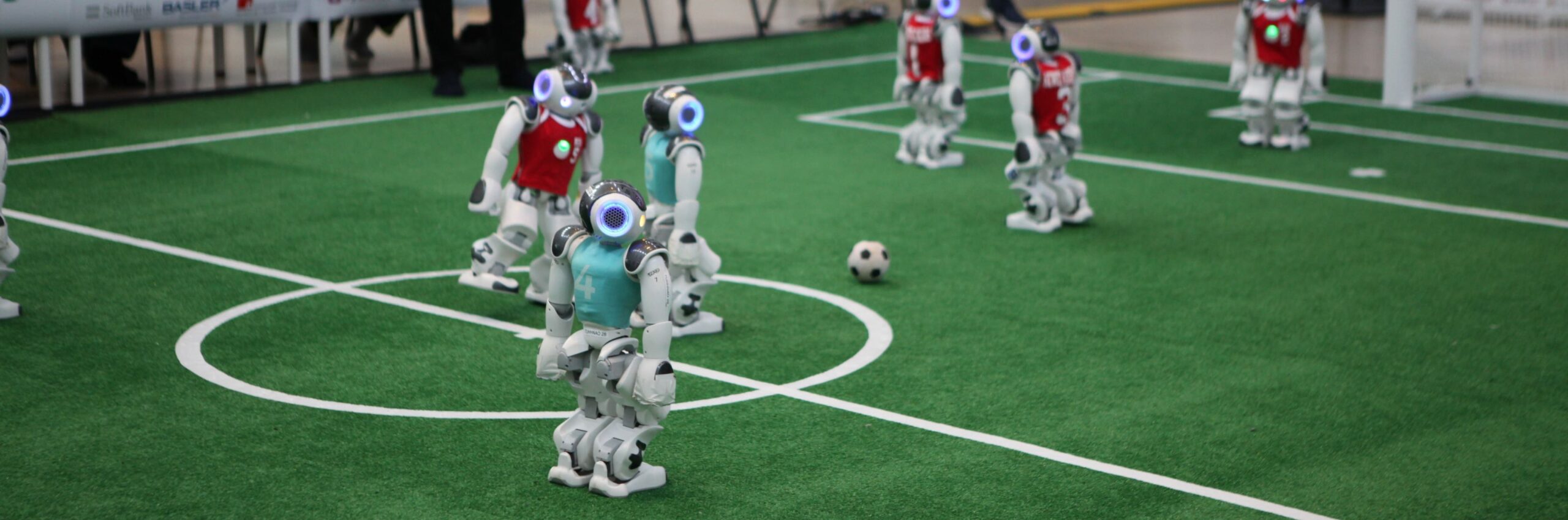
Join us for the RoboCup SPL World Championship 2023 in France!
A hundred teams of 4-10 researchers, professors and students from 45 countries.
At this level of competition, teams composed of researchers, professors and students push the state of the art of autonomous robotics every year. The scientific advances include image analysis, motor function, human and robot interaction and artificial intelligence decision making.