Wir melden uns zurück vom Hackathon mit einem kleinen Bericht zum 2. und 3. Tag:
Basierend auf den im vorigen Beitrag beschriebenen Fortschritten konnten wir nach einigem Kopfzerbrechen eine (noch zu optimierende) Steuerung für Pitch-, Roll- und Yaw-Parameter mit linearem Ansprechverhalten implementieren. In Abhängigkeit zu den vom Tactigon erfassten Dreh- und Neigungswinkel werden die Werte an den Crazyflie Client weitergegeben, interpretiert und an die Flugdrohne weitergeleitet.
Nun gilt es diese Steuerung zu optimieren, denn bisher konnte kein Flugversuch ohne gebrochenen Rotor beendet werden 😉 Hoffentlich können wir heute zu einem späteren Zeitpunkt ein Video eines erfolgreichen Flugversuchs teilen.
Die folgenden Bilder zeigen das verwendete Equipment (Tactigon-Board, T-Skin, Crazyflie 2.0, Crazyradio), sowie die Ergebnisse erster Flugversuche.

Crazyflie 2.0 & Crazyradio, Tactigon-Board, T-Skin
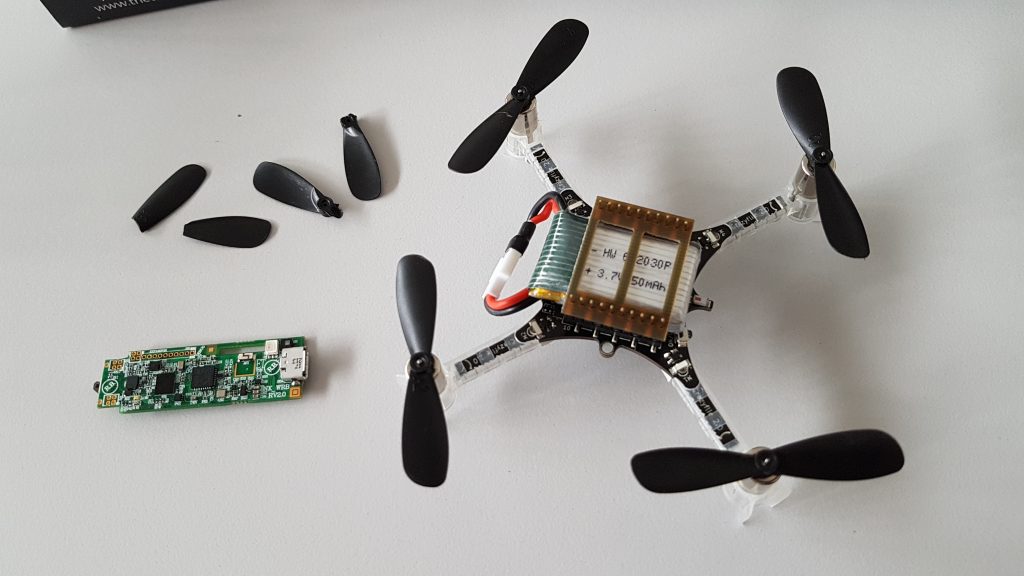
Tactigon-Board und Crazyflie 2.0